
摘要:通过介绍 HART协议基本概念、475手操器的基础知识、手操器与智能仪表的连接方式以及 475 手操器在智能仪表中的实际操作和应用方法,能够了解和掌握基于 HART 协议的475手操器在智能仪表中的实际应用技能,以便有效维护和检修智能仪表。
HATR协议简介
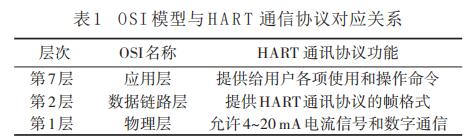
HART(HighwayAddressableRemoteTransducer)协议,即可寻址远程传感器高速通道的开放通信协议,是美国 ROSEMOUNT 公司于 1985 年推出用于现场智能仪表和控制室设备之间的通信协议。HART 协议使用 ISO /OSI开放系统互联模式,采用其简化3层模型结构,即第1层物理层、第2层数据链路层和第7层应用层,其对应关系见表 1。
HART通信使用载波传输的方式(即采用数字信号对载波进行调制后再实行传输)和半双工的通信方式(即信息流可在 2 个方向上传输,但同时只允许 1 个方向的传输)。HART 通信采用基于Bell202 通信标准的 FSK 频移键控信号,在低频的4~20 mA 模拟信号上叠加 1 个幅度为 0.5 mA 的高频数字信号进行双向数字通讯[3],2种信号共享硬件而不冲突。数据传输率为1.2 Mbps,由于FSK 信号的平均值为0,不影响传送给控制系统模拟信号的大小,保证了与现有模拟系统的兼容性[4]。 在 HART 协议物理层中规定,通信传输速率为 1 200 波特,数字信号用2个频率表示:1 200 Hz代表逻辑“1”,2 200 Hz代表逻辑“0”,如图 1 所示。

2 HATR475手操器简介
HART475 手操器是罗斯蒙特 HART375 手操器的改良升级型号,它旨在与不同设备生产商的各 种 HART 和 现 总 线 设 备 协 同 运 作 。 通 过 由HART 通讯基金会和 Fieldbus Foundation 支持的电子设备描述语言(EDDL)技术,可实现设备互操作性,可以对设备进行配置、维护或故障排除。手操器内存由 3 种组件构成。
(1)内部闪存:32 MB 非易失 RAM,储存操作系统和系统软件;
(2)系统卡:带有非易失闪存的 1 GB 或更大内部安全数字卡;
(3)RAM:32 MB,仅用于程序执行。连接 475手操器或系统卡,用户可使用 3种类型连接至简易升级程序:IrDA、蓝牙、支持的读卡器。
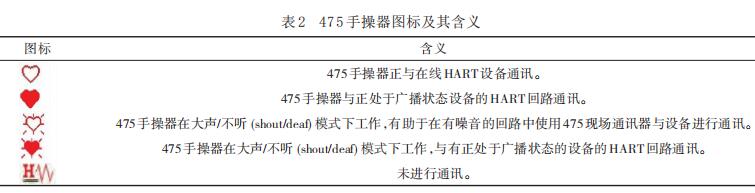
475手操器必须处于监听 PC模式,以通过 IrDA或蓝牙通讯。开启 475 手操器,点击主菜单,若在线 HART设备与手操器已连接,则会自动显示 HART应用程序在线菜单;如果没有连接设备,则几秒钟后显示HART应用程序主菜单。当 475手操器与设备通讯时,窗口上方将显示1个跳动的 HART图标。475手操器见图 2,图标及其含义见表 2。

3 手操器与现场智能仪表连接方式
3.1 连接到HART 设备
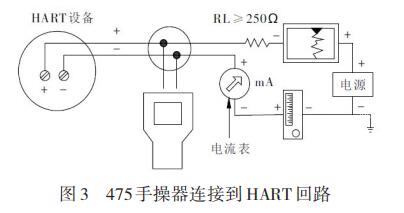
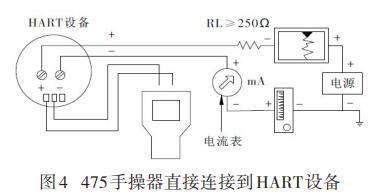
使用连接器将手操器与设备或负载电阻并联,不具有极性敏感,HART回路中须至少有 250 Ω电阻[5]。手操器顶端有 3个端口,红色是各自协议正极,黑色为 2个协议共享的公共端口。保护盖可以确保任一时刻只有 1 对端口露出。同时有端口标记,指明端口对应相应的协议。见图 3、4。
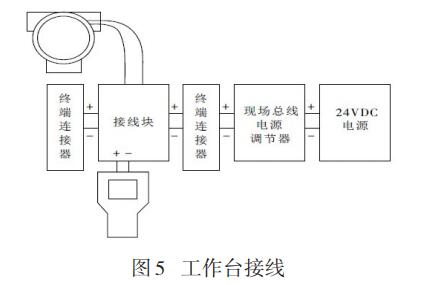
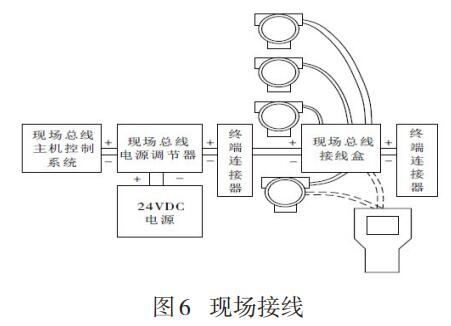
3.2 连接到现场总线设备
由于测量电路,通讯端口上的 475手操器现场总线连接器具有极性敏感。如果接线件连接错误,则会出现错误信息。
3.2.1 连接到现场总线设备接线 见图 5、6。
4、HART475手操器在智能仪表中的操作和应用
某天然气处理设施中,有罗斯蒙特智能温度变送器 171个、压力(差压)变送器 155个、Fisher智能阀门定位器 136个,所以熟练掌握 475手操器对智能仪表的操作技能,在智能仪表的维护保养、故障检查方面显得尤为重要。
4.1 回路数据监控和故障排查
在仪表校验或 DCS 系统显示故障时,将手操器按照文中 3.1 的连接方式连接至现场仪表。开 机,选择OnlineOverview进入界面。显示PV值、AO电流输出信号、LRV 量程下限值、URV 量程上限值。根据此 4 项数据判断智能仪表的故障。仪表校验时,可根据PV值和AO值计算仪表的精度。
4.2 各智能变送器参数的调整
(1)零点标定:智能仪表使用过程中零点偶尔会发生漂移,用手操器可方便标定:Device setup→Detailed setup→Sensors→Pressure sensor/Temp sensor→Sensor service→Sensor Trim→Zero Trim。
(2)量程调整:当变送器的量程过大不适用当前工艺流程时或当双法兰差压液位变送器存在正负迁移时,就需要对其进行量程的调整。475手操器操作修改上、下限值,点击LRV数值 在弹出界面输入修改值 点击确认,按SEND。
(3)修改位号和单位:新更换的变送器,位号和显示单位跟现场实际不对应,此时需要对其进行修改。Device setup→Basic setup→Tag→输入位号点击确认,按SEND,位号修改完成。Device setup→Basic setup→Unit,选 择 单 位 点 击 确 认 ,按SEND,单位修改完成。
4.3 模拟仿真信号进行回路测试
在智能仪表新投用或使用过程中 DCS显示异常时,在确认仪表无故障情况下,可用 475 手操器模拟 4~20 mA 仿真信号给 DCS 系统,测试回路的工作状态。 Device setup→Diagnostics And Service→Loop Test。输入模拟信号 4 mA、8 mA、12 mA、16 mA、20 mA,与DCS画面数据对比,测试状态。
4.4 对Fisher 智能阀门定位器的操作
在Fisher阀门检修后,新安装或生产过程中出现阀位偏差过大、反应迟钝时,需要对阀门定位器进行校验和调试。此处重点介绍用 475 手操器的引导设置功能对 Fisher 智能阀门定位器的第 1 次校验操作,具体操作如下:开→HART→Online→
Configure→Guided Setup→Setup Wizard→提示 Instrument Mode 置于 Not in Service→ENTER→RealyType,选择 A or C→ENTER→Instrument Family 选 择 DVC6200 /DVC6000→ENTER→ 选 择 Travel Control→ENTER→选择压力单位 PSI→ENTER→根据执行机构铭牌信息填写 Max Supply Pressure值→ENTER→选择定位器所安装的执行机构制造
商→ENTER→选择Actuator Model→ENTER→选择Actuator Size→ENTER→选择 Valve Closed,即控制信号为 4mA 时,定位器阀位反馈为 4 mA(0);选择Valve Open,即控制信号为 4 mA 时,定位器阀位反馈 为 20 mA(100%) →ENTER→ Yes→ENTER→Yes→ENTER→OK→SEND→ENTER→Yes→OK→ ABORT(因为还需根据阀门尺寸修改增益值)。Configure→Detailed Setup→Response Control→Tuning→Travel Tuning→Travel Tuning Set→选择合适的增益值(下 10“、12“阀选择 J,14”、16”阀选择K,18”、20“阀选择 L)→ENTER→Integral Enable→Disabled→返回 Configure→Calibrate→Travel Calibration→Auto Calibration→Yes→ENTER→ 进 入 自动校验程序→校验完→OK→Instrument Mode 置 于In Service→ENTER(完成整个校验操作)。对于已校验过的阀门定位器,再次进行校验,则为:开机→HART→OnlineConfigure→Calibrate→Travel Calibration→Auto Calibration→InstrumentMode 置于 Not in Service→YesENTER→进入自动校验程序→校验完成→OK→Instrument Mode 置 于In Service→ENTER(完成)。
5 结束语
针对智能仪表的应用和维护,介绍了HART协议和基于 HART 协议 475 手操器,并详细阐述了475手操器与设备的连接方式和475手操器在实际工作中的应用方法,可以使从事自动化仪表行业的工作者更加熟悉和掌握 475 手操器在智能仪表中应用的方法,以便在智能仪表的维护工作中快速有效查找和解决故障。









 关注我们 实现共赢
关注我们 实现共赢